「ロケット発射場の話(4)」
3. 世界の発射場(続) 【脱線1】発射場の位置による話
ここで「脱線」に入りたいと思います。最初に発射場の位置とロケットの打ち上げ方(必要機能・性能)との関係から触れたいと思います。(物理的内容を文章で正確に書こうとするために長々となりますが、ご容赦お願いします)
(1)静止衛星の打ち上げ方との関係
現在の商業打上げの大半の静止衛星は赤道上空で地球の自転と同じ周期で地球を廻る(半径の6倍近い)高度約36000kmの円軌道に入ることが必要で、地表から最も効率的に打ち上げる方法が赤道上の発射場から楕円軌道(「静止トランスファ(=遷移)軌道」という)でこの高度まで飛んでいってそこで円軌道に移るために加速することであることはよく知られていると思います。先回の(12)(a)のような移動式海上プラットフォーム打上げ方式はこの発想によるものです。
- (a) 赤道以外から打ち上げる場合も同じような楕円軌道にまず入れますが、この楕円軌道は地球の赤道面に対して傾くものとなること(傾きの角度を「軌道傾斜角」という)とこの楕円軌道の一番遠い静止軌道の高度に来た時が赤道の真上になっていることが必要であることが、ロケットの機能・性能に重要な影響を与えることになります。すなわち、楕円軌道の仕組み上、地球に一番近い地点も赤道の真上になる必要があり、緯度のあるところからロケットで打ち上げる場合は、いったん赤道上空まで低い円軌道(「パーキング(=待機)軌道」という)でしばらく飛行させて赤道上空に来た時に相当の加速をして静止遷移軌道に移る必要がある、ということになります。
- (b) ロケットの打上げの大半が推進薬であり、それをロケットエンジンで燃焼・高速度で排出した反動で加速してこれらの軌道上の速度を「獲得」していくこと、無駄な加速をしないで直線的に加速しながら空気層を早く抜けて高度を上げていくことが最適であることも容易に理解頂けると思います。また、万有引力の法則・エネルギー保存則などから地表に近いところでの円軌道(楕円)の速度が大きくて、遠方に行くほど小さくなる/小さくて済む、ということも(a)を考える時に効いてきます。すなわち、(ある程度の)軌道傾斜角を「変更」する場合には遠方で行うことが圧倒的に有利になるのです。(いわゆる速度「ベクトル」の「合成」になり、三角形を描いてみればよく分かります)
- (c) 上記から、一般的にある緯度からの静止衛星の打ち上げ方は概ね次のようになります。
ア) 真東に打ち上げ・加速して低高度の円軌道(速度は8km/秒弱)に投入して赤道上空まで飛行(地球を1/4周近く)させる。(応用としては、赤道の少し先に「落下」する弾道飛行でもよい)
イ) 赤道上空で2.5km/秒ほど加速して、遠地点が静止軌道高度になる長楕円軌道に投入する。(軌道傾斜角がいくらであっても、ほぼ加速前の飛行方向に加速して傾斜角はほとんど変えないのが基本である)
ウ) 楕円軌道を半周(5時間ほど)飛行(あるいはもう何周かしてもよい)して静止軌道の高度になったところ(この時速度は1.6km/秒になっている)で軌道傾斜角に応じた加速(軌道傾斜角が0度であれば1.5km/秒、フロリダ半島・中国西昌・種子島から等では1.8km/秒、バイコヌールからだと2.4km/秒ほど)を行って赤道に平行な円軌道速度(3.1km/秒)になるようにする。従来からこの加速は人工衛星側にエンジンを装着して行ってきたが、最近は(e)に述べるような「やり方」が主流になってきた。 - (d) ロケットの加速能力は、ロケットエンジン排出ガス速度(「エンジン比推力」が相当する)と、推進薬量とそれ以外の加速される質量の比(多段式ロケットではそれらの組合せ・合計)で決まり、静止衛星を打ち上げるような大型ロケットでは特に最終加速の第2(又は~4)段の機能・性能を高くして有効に加速する方式が主流になっている。静止衛星を打ち上げる各国のロケットはこの段に液体水素/液体酸素のエンジン(あるいはそれに次ぐもの)を使用するのが主流になっている。そして上記(c)の(3)の加速の後半と(イ)の加速の両方をこの最終段で行うのが(ロケットの設計上)一般的に要求されることになることが多く、このエンジンはいったん燃焼を停止させて(ア)の「赤道上空までに地球を1/4周近く飛行」した後に再度燃焼させる(再着火)機能が必要になる。
ところが、赤道に近い低緯度のところから打ち上げる場合は、「赤道上空」が少々「ずれて」いても微調整の範囲で静止軌道には持っていけるので(c)の(ア)の「赤道上空まで地球を1/4周」はさせなくてもよい、すなわちいきなり地上からの「連続的な加速」により静止衛星高度に至る長楕円軌道に乗せることが許され、最終段の再着火機能はなくてよい。
以上により、赤道近辺から静止衛星を打ち上げる利点が明らかで、
(ア) 最終段エンジンの再着火機能が不要(ただしあれば(e)のシーロンチに述べるような使い方は出来る)
(イ) 静止軌道に投入するために必要な加速の量が少なくてよい。(特に従来から人工衛星で加速している分)
(ウ) 地球自転による「初速」は赤道上で最大(0.465km/秒、緯度30度で0.4km/秒,50度でも0.3km/秒あるので(イ)に比べれば効きとしては小さい) - (e) 静止衛星が「商品化」されてきた結果、およびアリアンロケットが静止衛星打上げの市場を占めるようになった結果、低緯度からの打上げに合せた「既製品」的なものが静止衛星の調達上「標準的」になってきた面があり、(c)の(ウ)の最後に書いた「従来からこの加速は人工衛星側にエンジンを装着して行ってきた」は、高緯度からの打上げに対しては(商業衛星の世界としては)ある意味時代遅れになってきて、ロケット側で赤道からの打上げ並みにしてやることが有利な/必要なことになってきた。この方法として以下がある。
(ア)最終段再々着火/長時間飛行機能をロケットに持たせる従来衛星側で行っていた遠地点での加速の一部を(あるいは全部でもよい)行う。これにより、従来は近地点での赤道上空での加速により静止遷移軌道に乗ったら衛星は分離してロケットの役目は「終わり」であったが、衛星分離は静止遷移軌道の遠地点とすることになりロケットに長時間の誘導制御が要求され、衛星も「待つ」ことになる。
プロトンロケットではこれに合致した機能を有する最終段を開発して、商業静止衛星をアリアン並みの頻度で打ち上げている。米国では1970年代からタイタンロケットにこの機能を持たせて、静止衛星直接投入(「アリアン並み」ではなく遠地点加速全部を行う)を行っていたが、最近はデルタロケットの最大サイズ型でこの方式を実施している(これらは商業衛星ではなく、国防ミッションである)。アトラスロケットでは飛行時間が半分位になるように少し変形した待機/遷移軌道を使用して「アリアン並み」になる軌道投入を行っている。日本のH2Aロケットでも、2015年11月の29号機でこの方式を採用して商業通信衛星の打上げを行った。
(イ)高遠地点軌道投入方式/近地点軌道傾斜角変更方式/中間加速近地点高度変更方式
(ア)の機能を持たせなくても人工衛星側の加速量を軽減させる方法であるが下記の限界・損失がある。
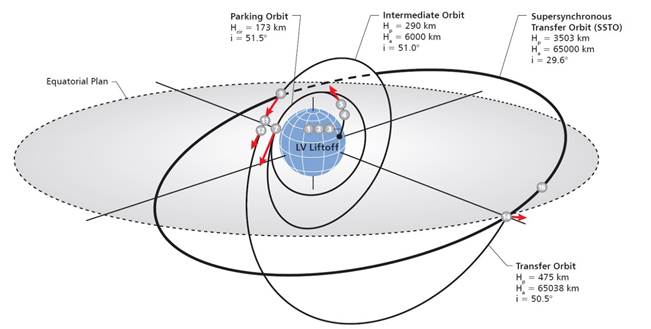
●高遠地点(スーパーシンクロナス)トランスファ軌道投入
(b)で触れたように、遠方に行くほど楕円軌道の遠地点での速度が小さくなり軌道傾斜角分の速度ベクトルの変更に費やされる加速量を減らすことが出来る(理論的には無限に遠くに行けば0になる)ので、遠地点でのロケットによる再々着火をする代わりに、「近地点での速度を大きくしてやって」遠地点を上げてやることで同様な効果がある程度得られることになる。ただし、いったん静止軌道より遠くに飛ばして、また静止軌道の高度まで下げなければならないのと、遠くまで行くということはそれだけ通信距離が長くなる、長い時間飛行する必要(軌道の周期は楕円長半径の1.5乗に比例する)があることなど不利な要素がある。また、ロシア打上げのような軌道傾斜角の大きいケースでは効果絶大だが、中途半端な緯度からだと高遠地点へ行って戻る分の加速/減速の追加分との「バランス」から効果が薄れてくる。
具体的には、日本・米国・中国打上げの場合は(c)(イ)の赤道上空での加速量(2.5km/秒)をあと0.5km/秒大きくして衛星を分離してやると衛星側が静止軌道に入るために必要な加速量は(c)(ウ)で緯度0度から打ち上げた場合と同じ1.5km/秒になる。ただしこの時の遠地点高度は3倍超の120000km(楕円軌道の周期は通常の4.5倍)にもなってしまう。
●近地点軌道傾斜角変更
遠地点高度を高くしないで遠地点加速必要量を軽減する近地点加速の方法として、赤道上空で軌道傾斜角を変える場合、日本・米国・中国打上げの場合で上記加速量の2.5km/秒をその倍位にして赤道上空で元々の進行方向に対して76度方向に加速する必要があり、これを仮にまっすぐ加速すれば地球を軽く脱出して火星と土星の間にある小惑星帯の真中((あるいは水星の軌道近く)まで行ける速度にもなる。
●中間加速近地点高度変更(楕円パーキング)方式
アトラスロケットで(ア)方式の他に盛んに行われている方法で、赤道上空での近地点加速(再着火)はせず、待機軌道をある程度の高度の楕円軌道にして、高度が上がったところで再着火加速を行い近地点の高い(衛星側必要加速量がアリアン並み/以下になる)静止遷移軌道に投入する。 (加速量合計の上での「損失」はいずれにしても免れないが)メリットとしては、 ・衛星を分離するタイミングはそれほど遅くならない(3)で「5時間ほど」と言っているのが1.5時間位) ・軌道傾斜角を変更時は(高度の上がった分)速度の落ちている所なので損失が低くなる ・遷移軌道の遠地点を高くしなくてすむ(or するにしても抑えられる) などある。
最終段に長秒時飛行/再々着火機能を持たない中国長征ロケット、米国ファルコンロケットはスーパーシンクロナス+近地点傾斜角変更での対応となっている。 逆に赤道上打上げのシーロンチは、打ち上げ能力に余裕のある場合は楕円パーキング軌道を使用して、近地点の高い(衛星にとってはアリアンより有利な)静止遷移軌道に投入している。(しかも全飛行時間は1時間以下で)
下図に、2016年6月のプロトンロケットによるインテルサット31の打上げプロファイルを例として示します。最上段の性能・構造上の理由により燃焼(図中の赤矢印)は合計5回45分超に及び(そのうち近地点側燃焼加速が3回37.8分)、全飛行時間は15時間超で、スーパーシンクロナス遠地点加速軌道(これでもアリアン打上げより僅かに不利)に投入したものです。
(http://www.ilslaunch.com/sites/default/files/pdf/Intelsat-31_MO.pdf)
プロトンロケットでは、2つの静止衛星を搭載して片方をアリアン並みの遷移軌道に投入した後、更にもう1度燃焼してもう1つは静止軌道に直接投入、という実例もあります。
(2)太陽同期軌道打上げの場合
地球の表面を観測する(目的は軍事含めて色々あります)によく使用される(日本では太陽観測衛星でも使用されている)「太陽同期軌道」(太陽との位置関係が常に同じになるような地球周回軌道)は、軌道高度に対して軌道傾斜角が理論的に決まっていて、よく使用される高度500~900kmの範囲で97~99度(赤道面順方向に対して垂直以上に傾いて廻る「極軌道」)である。
この軌道に打ち上げるにはほぼ北向き又は南向きの(少し西に向く)打上げが必要となり、緯度にはほとんど関係が無い(赤道上における自転速度はむしろ性能的には (必要到達速度で0.1km/秒以下相当だが) マイナスになる)。
地図を見れば容易に分かりますが、日本の太平洋側から方位角98度方向は太平洋が開けているのですが、緯度で20度(距離で2200km)程種子島から行くとフィリピンの近くを通り、直後にインドネシアとオーストラリアを「通過」することになります。H-ⅡAロケットの場合、第1段ロケットの落下点が南フィリピンの東方、インドネシアの手前になるようにしますが、始めから最終方位角方向に飛ばすのは、フィリピンに近づくのと、発射直後に万が一軌道が逸れた場合に宇宙センターの竹崎地区の安全を確保するための上空の東風の制限を厳しくしてしまうこと等から最初は少し東向きに進路を取ります。(ロケットの打上能力的に同一方向に直線的に加速する「原則」からはその分外れますが。)
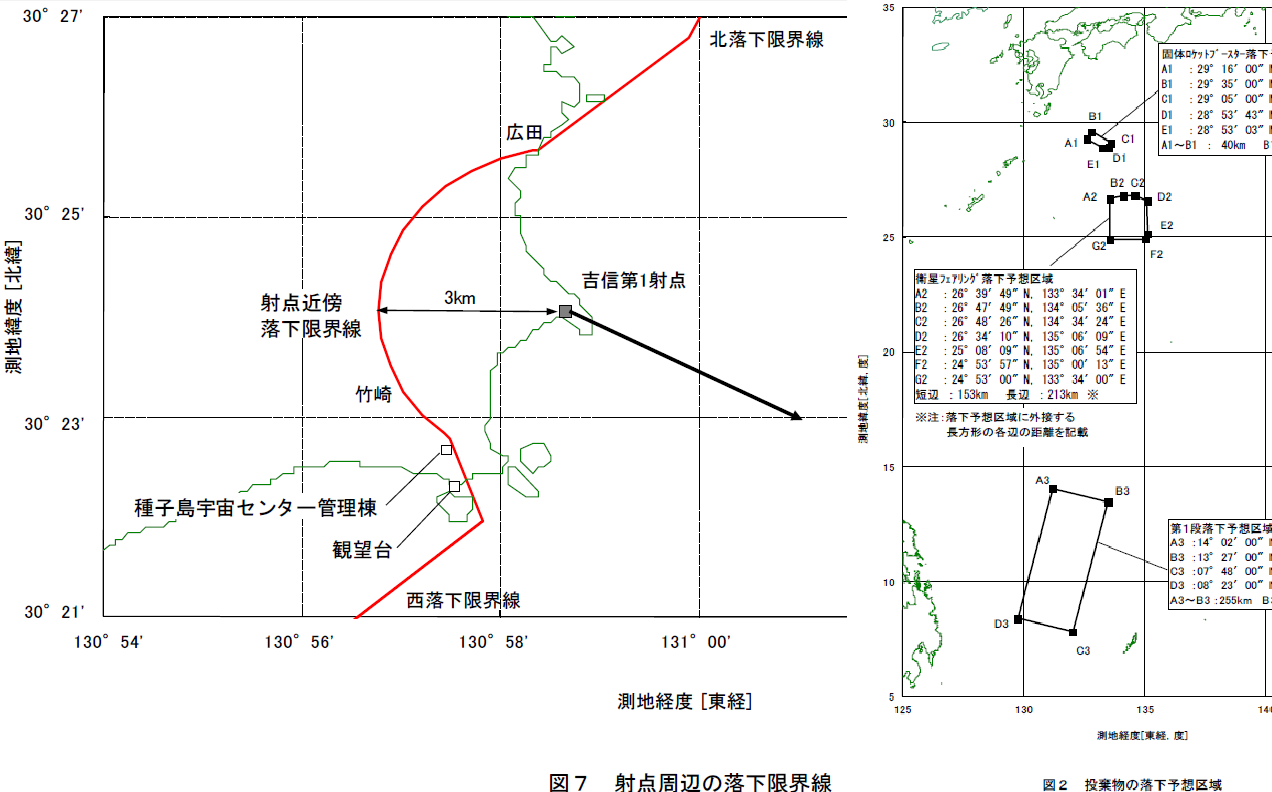
(宇宙開発委員会安全部会平成24年第4回配付資料;H-ⅡAロケット21号機飛行安全計画より)
また、H-ⅡAロケットで固体ブースタの本数を増やしたタイプや、さらに第1段を強力にしたH-ⅡBロケットの場合は、第1段の落下域が遠く(=もっと南)になってくるためインドネシアの手前に落とす条件では打上げ能力が上がらない、ということになります。
北海道から打ち上げれば、この方向への打上げ能力を引き出すことが出来る、という話は概ね上記によることになります。
今回は「発射場」に深く関わる「ロケットの(静止衛星」打ち上げ方式・能力」に焦点を合わせてみました。次回は現在打ち上げに使われていない特定の発射場への「脱線」の予定です。




